6. May 2020
|

Further potential for reducing real-world consumption can also be found in heavily electrified or even all-electric vehicles. High levels of automation have proven to be an attractive solution. FEV has therefore drawn up this comprehensive study which quantifies the saving potentials for different vehicle concepts and describes possible implementation strategies in cooperation with AImotive.
Today, various solutions are already being implemented to achieve consumption savings in real-world operation. For example, Eco-Drive systems instruct the driver on how to drive more efficiently or current traffic and route information is utilized to streamline the route and optimize the powertrain’s operation strategy.
The rising degree of automation and connectivity will increasingly take the driver out of the control-loop, improving predictability and therefore the energy saving potential in real-world operation. This potential consists out of two core elements:
A recent survey conducted by FEV has shown that for highly automated vehicles the relevance of performance-oriented features such as engine power or acceleration capability are fading. However, the importance of ride-comfort is rising due to changing use-cases and activities of vehicle occupants.
As a result the powertrain can be optimized to meet these emerging requirements, resulting in potential energy consumption benefits.
>> SUPPLIERS HAVE THE OPPORTUNITY TO POSITION THEMSELVES AS INNOVATIVE SYSTEM SUPPLIERS AND INTEGRATION PARTNERS FOR AUTOMATION SOLUTIONS
As part of the study, FEV has quantified saving potentials for three different vehicle concepts. These included one ‘allrounder’ car (concept 1) and one dedicated ‘city’ car (concept 2). Both feature SAE Level 4 automation, which means that they are assumed to be predominately operated in autonomous drive mode. The third vehicle concept (concept 3) was equipped with a SAE Level 3 Highway Chauffeur function. Concepts 1 and 3 are based on a plug-in hybrid powertrain, while concept 2 is a battery-electric vehicle. Based on a statistical analysis involving 12,000 real-world drive cycles, representative driving profiles were modified approximating the behavior of highly automated vehicles. This simulation was based on the following premises:

Classification of the vehicle concepts analyzed
For the allrounder PHEV concept 2 vehicle, modifications to the powertrain components (including the battery) were made and the driving strategies were optimized. The combined power output was reduced by roughly 20 kW and the battery capacity was increased by 40 percent.
These measures reduced fuel consumption, taking a shift in utility-factor into consideration, by about 43 percent while the electricity consumption simultaneously increased by 12 percent. The energy savings are generated in equal parts by drive strategy and powertrain optimization.
In comparison, fuel savings of about 7 percent and electric energy savings of 3 percent were realized in the Highway Chauffeur concept 3 vehicle. The lower potential of concept 3 compared to the concept 1 vehicle can be traced back to two factors. Firstly, the driving strategy optimization in the Highway Chauffeur function only occurs in a limited vehicle speed range. Secondly, the powertrain in concepts with lower automation levels cannot be modified because of the remaining customer requirement for performance during non-automated operation.
The city car (concept 2) showed energy savings of more than 10 percent. In this case, the lower savings result from the comparatively low weight of the smaller vehicle and the lower degrees of freedom in operation strategy of the all-electric drivetrain (compared to hybrids) which therefore decreases the optimization potential.
The considered vehicle concepts require extensive, comprehensive hardware and software solutions. A scalable and cost-efficient approach for environmental modeling consists of combining image-based detection methods with additional radar sensors. Additionally, V2X connectivity is required in order to provide information on traffic flow and to expand the prediction horizon by connecting the vehicle with its environment.
High definition (HD) maps are a requirement for locating the vehicle and further optimization of the driving strategy. While previous generations of highly automated vehicles mainly used LIDAR based HD maps, current preferences evolved towards conventional maps enhanced with meta-info (lane markings, traffic signs etc.) and landmarks (characteristic waypoints). This shift is enabled by significant improvements in visual-based object detection and reduces the amount of data needed for storage. In the upcoming years it is expected that improved algorithms will decrease the data size further which will therefore likewise reduce the required bandwidth for HD map updates. However, this will also increase the required on-board computing capabilities.
Highly automated vehicles must additionally have the ability to make real-time decisions. Current software kits, such as those provided by AImotive, make driving decisions in a so-called “Motion Engine”. It consists of different modules, including motion tracking and prediction, trajectory planning and action-specific decision making.
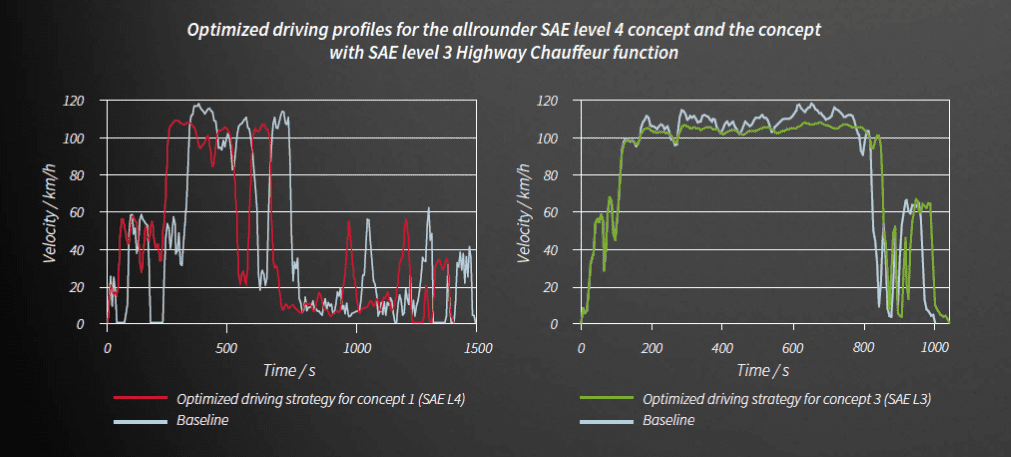
Optimized driving profiles for the allrounder SAE level 4 concept and the concept with SAE level 3 Highway Chauffeur function
>> AUTOMATION AND CONNECTIVITY INCREASE THE PREDICTABILITY AND THEREFORE THE EXPECTED ENERGY SAVINGS OF HIGHLY AUTOMATED VEHICLES IN REAL-WORLD OPERATION
Object tracking and prediction is done by detection, identifying locations and tracking across multiple time intervals together with different traditional statistical methods and artificial intelligence. Because the accuracy of the prediction has a direct impact on motion planning, the calibration of these parameters has a large impact on the potential energy savings. At the trajectory planning, the current scenario is dynamically adapted using heuristic and pre-defined rules. Functions which increase efficiency can also be embedded on this level, which leads to optimized speed, acceleration and steering profiles for specific maneuvers. As a consequence of optimized neural networks (NN), this also covers trajectory smoothing.
Essential training for the “Motion Engine” is done in a simulation environment which is based on a vehicle model and real-world physical dynamics. The neural network in the Motion Engine can be optimized by adapting the model for specific vehicles, powertrains and functions. For example, existing operating strategies can even be embedded directly in artificial intelligence through relatively simple adaptation.
As the use of sensors and data processing increases, so does energy consumption in the vehicle. The load on the vehicle electrical system can increase by up to 1 kW and more if numerous cameras and LIDAR sensors are used. In the future it is expected that new advanced chip architectures will significantly reduce energy consumption.
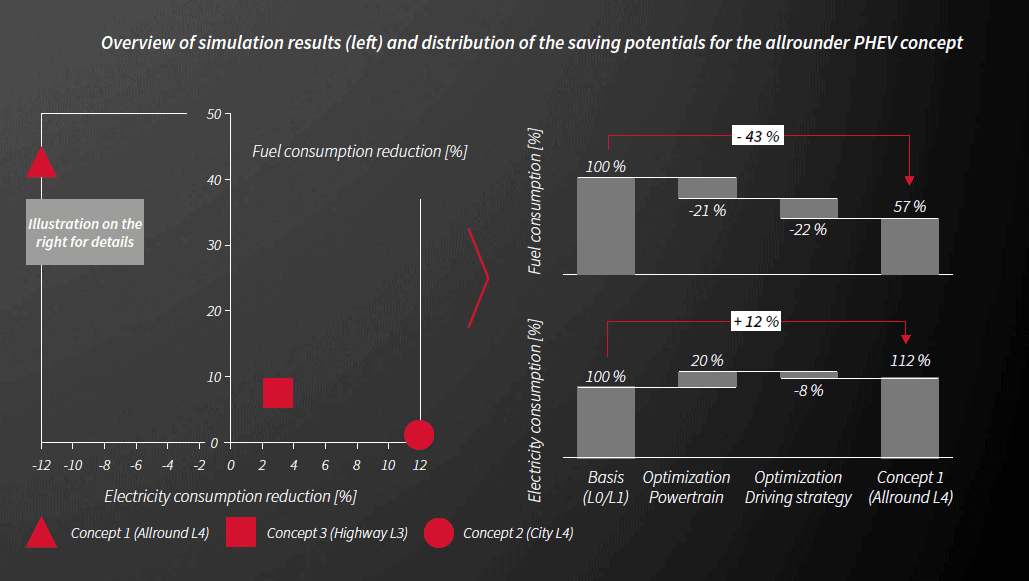
Overview of simulation results (left) and distribution of the saving potentials for the allrounder PHEV concept
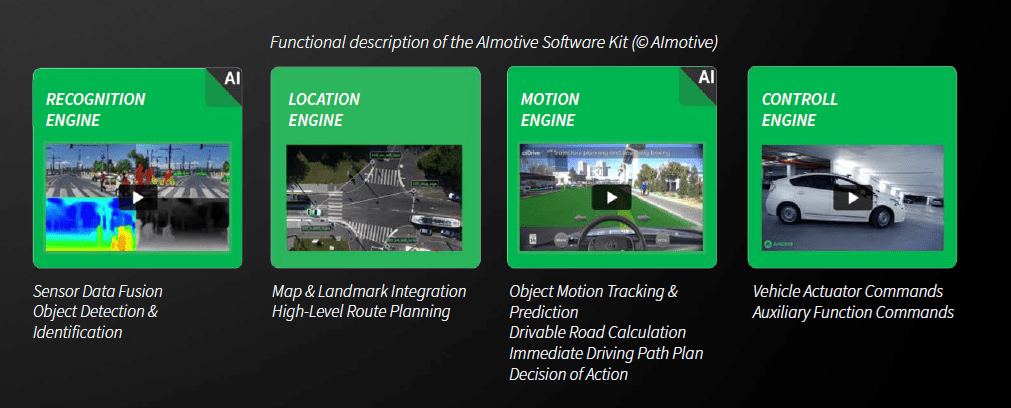
Functional description of the Almotive Software Kit (© Almotive)
For automotive manufacturers, the challenge lies in selecting appropriate technologies and in the large number potential cases to be tested in order to develop an efficient hard- and software basis. Yet another challenge involves verifying the functional safety of self-learning automated systems. With increasing degrees of connectivity, additional attack vectors emerge and need to be considered which have to be covered by suitable security mechanisms.
For suppliers this represents an opportunity to identify these trends early and to accordingly position themselves as innovative system suppliers and integration partners for automation solutions. By combining software and hardware, new systematic solutions emerge which will reduce complexity in development projects and create synergies in the validation process.



