6. May 2020
|

To ensure a reasonable development time of future complex hybrid powertrains, while maximizing their efficiency, and improving the early prediction of the vehicle behavior, advanced tools and methodologies are mandatory. Relying on its long and proven experience in testing activities, its strong expertise in developing and providing competitive testing products like MORPHEE, and on its recognized know-how in using simulation to create advanced and innovative solutions, FEV decided to merge real and virtual worlds to create and offer a Hybrid Tool Chain to overcome these challenges. This 3-step Hybrid Tool Chain is a practical solution, from the Model-in-the-Loop front-loading phase to the X-in-the-Loop validation phases, “X” standing for combustion engine, battery or electric motor for instance. To ensure the optimization of the development of hybrid powertrains and energy management system (EMS), and benefit from simulation-based methodologies, FEV proposes to use a dedicated HiL step, which allows a seamless transition between the MiL and EiL phases, to create the Hybrid Tool Chain. This Hybrid Tool Chain relies on FEV’s advanced co-simulation platform xMOD, a platform which combines an integration environment for various heterogeneous models, together with a virtual test laboratory, and offers a range of different functionalities, such as the integration of heterogeneous models, the protection of the model contents, when they are imported, the virtual instrumentation, or the test automation. Moreover, xMOD provides simulation functions in various simulation schemes: real-time, extended time or as soon as possible, which are really useful features for MiL, HiL and EiL environments. In this first step of the Hybrid Tool Chain, the objective is to set-up a full hybrid vehicle model of the targeted application, and integrate it in the xMOD environment. To that purpose, FEV uses classical simulation tools and software available on the market. The vehicle modelled is a parallel hybrid with an automated manual transmission. The simulation is made in a forward approach with a 1D model for the vehicle and drivetrain components. Cycle set points are sent to a driver model in Simulink. According to these set points the driver generates accelerator and brake targets for the vehicle supervisory system and transmission target for the gearbox and clutch. The vehicle supervisory system interprets the accelerator and braking targets, manages the energy in the battery, the torque split between the combustion engine and the electric motor, and the drivetrain mode between Electric Vehicle (EV) and Hybrid Electric Vehicle (HEV) modes. The Energy Management System (EMS) is located in the vehicle supervisory model. First it estimates the power needed to propel the vehicle and the power needed to follow the battery state of charge requirements. With this power demand, it chooses if the vehicle must run in EV mode or HEV mode according to customizable power levels. In EV mode all the torque is provided by the electric motor. As a consequence, the vehicle supervisory system passes all the torque targets from the driver, to the electric motor. In HEV mode, the torque demand is split between the electric motor and the combustion engine, to optimize the system’s efficiency. In HEV mode the torque demand is not only the torque asked by the driver to move the vehicle, but also a torque estimated to meet battery state of charge target. The integration process in xMOD is composed of 3 main steps. First, the hybrid vehicle model is tested in a fixed step co-simulation environment, to validate the functional behavior of the platform, and ensure, in the end, the real time ability. Then, the hybrid vehicle model is split into blocks that represent the different parts of the Virtual Test Bed and Engine-in-the-Loop configurations: Finally, these three “blocks” are compiled with the xMOD target, and then integrated into xMOD). At this step a Human Machine Interface (HMI), or dashboard, is also created to be able to visualize the interesting variables and to have access to the relevant parameters of the system. Once this platform is set-up, the hybrid vehicle model capability to follow the driving cycle as well as the behavior of the energy management system are validated.
Using xMOD means:
FEV´s Hybrid Tool Chain
The Hybrid Tool Chain in Use
Energy Management System
Integration in xMOD platform
Block 1: “Test automation block” that sends the cycle set points and manages the information transfer between the blocks. It emulates the automation system environment that is integrated into MORPHEE at steps 2 and 3.
Set-Up of the Virtual Test Bed
Once this first xMOD simulation platform of the hybrid vehicle is created, the second step, called Virtual Test Bed (VTB), becomes relevant. It consists in coupling the xMOD simulation platform, to a test-bed computer, and start the preparation and the validation of the communication protocol. One of the objectives of the VTB is also to allow test bench engineers and technicians to prepare their test procedures. The VTB must thus be able to represent, in a virtual environment, the main behaviors of the engine test bench.
Benefiting from all the work performed in step 1, the following steps are fast:
Another advantage of the Virtual Test Bed is the possibility to develop and validate specific test procedures, before being at the real engine test bench. For instance, a specific component to master stop and start of the engine was developed, tested and validated at this HiL step. Finally, this “3 computer configuration” of the VTB allows to validate the whole communication protocol and the engine test bench procedures, to train the engine test bench team, and ensures the consistency of the simulation results, in a real time environment.
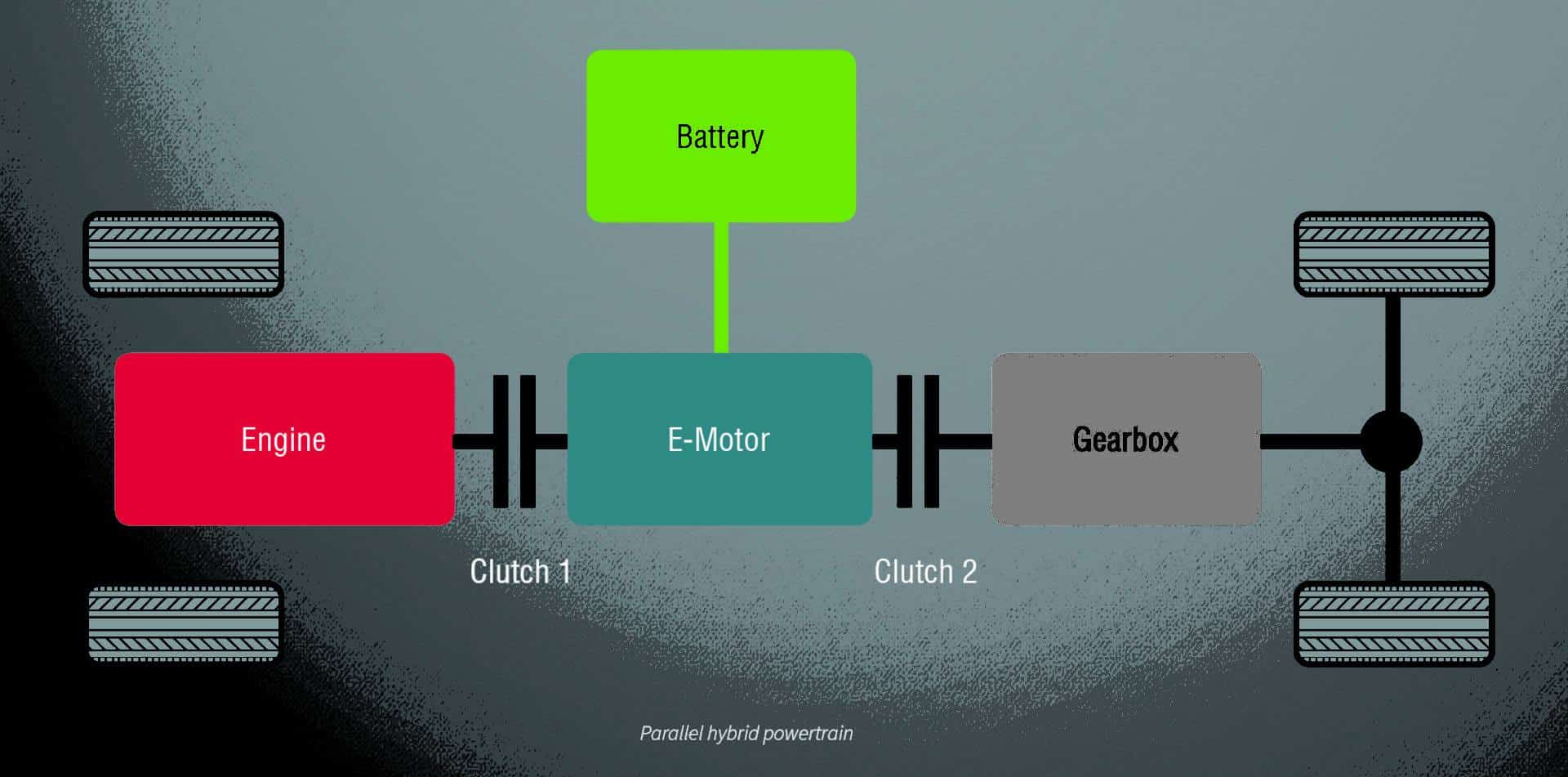
Parallel hybrid powertrain
Due to the previous work done in steps 1 and 2, this last step is pretty fast and does not require extra human resources compared to a classical calibration test phase: At first, the standard test bench procedure to put the previously prepared engine is done. Then the engine installation validation protocol is followed up, in order to ensure the safety of the people and the protection of the engine. Then the engine can be started and the test bench automation system proper functioning is checked: control loops, and plausibility measurements for instance. Depending on the “fresh” state or not of the engine, a run-in phase can be performed. It was not necessary to do so with the engine of this study.
Finally the simulation computer can be disconnected from the VTB and directly connected to the bench automation system (via an S-Link communication protocol). The test bench procedure can be downloaded from the MORPHEE computer of the VTB, directly from the network, and uploaded on the test bench computer.
As soon as all the devices are connected, the test bench operator has access to a library containing different drive cycles. During the test cycle, MORPHEE sends the parameters related to the driving conditions to xMOD, especially the vehicle speed, and gets back from the vehicle and its driver models, the desired operating point of the engine (engine speed / engine torque). Then MORPHEE directly controls the engine speed by driving the dyno and the engine load via a simulation of pedal signals.
During the automatized test cycle, no intervention from the test bench operator is required. The engine is started and stopped automatically and all data (bench sensors, ECU data, xMOD simulated variables and parameters) are collected in the same data file.
The operator can thus focus on calibrating the EMS, thanks to the dashboards of xMOD, or can, for instance, modify the parameters of the hybrid vehicle (mass, gearbox ratios or battery capacity for instance).
One additional advantage of using this Hybrid Tool Chain, and xMOD, is also the possibility to keep, inside the xMOD computer, an engine model at the EiL step. In that case, xMOD is able to send the simulated engine variables to
MORPHEE and these values can be compared to the measurements. It makes thus a strong and reliable monitoring of the engine and the acquisition system possible in order to detect or anticipate any malfunction by comparing physical data with the engine model outputs, and thus save a lot of time and money by stopping the test procedure, as soon as an incoherence is detected.
The Hybrid Tool Chain is an already fully efficient tool chain for hybrid powertrain development. It offers a lot of additional functionalities which are required to develop and validate Advanced Driver Assistance System (ADAS) for instance. Moreover, the versatile and open xMOD co-simulation platform can allow the integration of additional models like environment or traffic models.

MiL configuration containing 3 main blocks



